")
")
")
Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Your quotations are available online on your customer account.
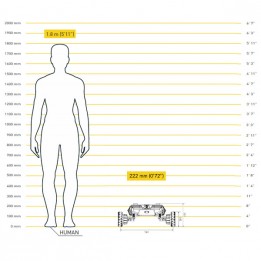
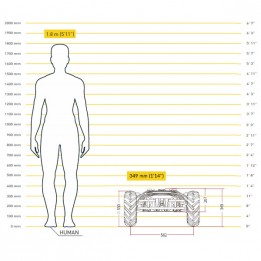
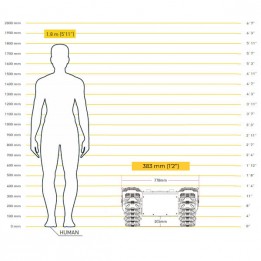
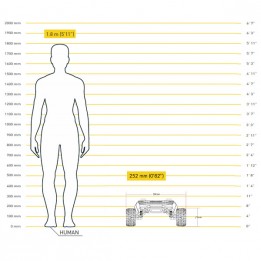
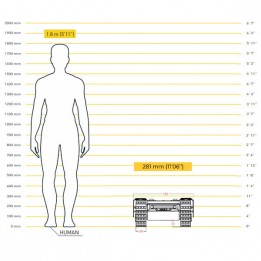
The AgileX Autopilot Kit offers a complete system for the autonomous GPS navigation of a high-performance robotics chassis. It’s a Linux-programmable, fully ROS-compatible platform you can use for working on a wide variety of applications.
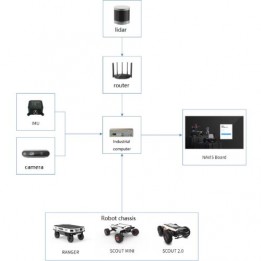
The AgileX Autopilot robotics kit consists of different modules designed to enable the autonomous navigation of your robotics chassis . The AgileX Autopilot uses numerous navigation instruments and GPS technology for point-to-point navigation : IMU , laser, binocular camera, depth camera , etc.
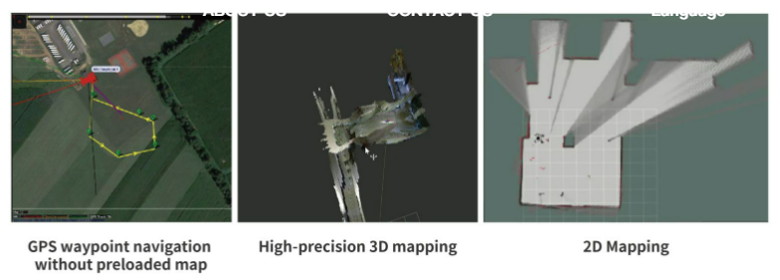
Your mobile platform will be able to navigate a given route while avoiding obstacles, and also find its way in an unfamiliar environment.
The AgileX Autopilot Kit includes:

With the AgileX Autopilot Kit, you will enjoy far more development and application possibilities than with a traditional mobile platform. Thanks to the mechanical capabilities of the various adaptable chassis, your kit will have all the qualities of an off-road vehicle. Its programming environment and resources are entirely open-source for immediately developing applications in various scenarios: environmental monitoring, agriculture, outdoor survey, surveillance and security, etc.

")
The AgileX Autopilot Kit offers a complete system for the autonomous GPS navigation of a high-performance robotics chassis. It’s a Linux-programmable, fully ROS-compatible platform you can use for working on a wide variety of applications.