Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Your quotations are available online on your customer account.
Amateur roboticians, researchers and industrial developers are well aware of the advantages of Dynamixel X-Series servo motors. The XW540-T140-R servo motor meets all requirements with its high resolution, high baud rate and multiple programming possibilities..
If you're looking for an ultra-precise robotic accessory that offers detailed feedback and numerous control modes, the X-Series reaches out to you. It brings together a growing number of models with varying degrees of speed or power, with TTL or, like this one, RS485 connections. The X-Waterproof series, a new addition to the manufacturer's already well-stocked range, opens new doors for roboticians looking for aquatic adventures.
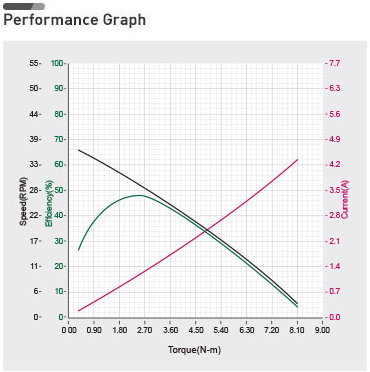
Robotis sealed servo motors are available in two models: The XW540-T260-R has a speed of 40 rpm. It is a servo motor with a powerful torque, capable of operating on difficult terrain.
The Dynamixel XW540-T140-R servo motor, on the other hand, is almost twice as fast with less torque. If you want to build a fast exploration machine without a heavy load, you should select this servo motor.
These two servo motors obviously differ in their degree of protection. IP68 corresponds to the maximum protection in terms of dust penetration. Its watertightness level allows it to remain underwater up to 24 hours depending on the depth (between 1 and 3 meters).
Take advantage of these many free online resources to learn all about your Dynamixel XW540-T140-R Servo Motor.
Check that your Dynamixel servomotor is correctly configured. Do not hesitate to re-flash it with the ROBOTIS Software Roboplus. After re-flash remember to re-configure it. If the issue is not solved, contact us for an advanced support.
The motor is probably not well mounted. Check that you correctly mounted the horns by respecting the mark.
There is probably a mechanical issue with the Dynamixel servomotor. You can directly contact us to get more advance support.
Check your power supply and the system cabling (try with a different servomotor). You can also reset the servo. If nothing works, the best solution is to go through the Dynamixel servomotor checklist!
The 1.0 protocol is dedicated to the Dynamixel AX and MX series. Protocol 2.0 is for the X and Dynamixel Pro series. Protocol 2.0 control tables include PID controls which allow for more precise adjustment of the servo motor movements. Protocol 2.0 can be updated on MX series servo motors. You can refer to the protocol 1.0 and protocol 2.0 pages for more informations.