- assembled")
 - assembled")
 - assembled")
 - assembled")
 - assembled")
 - assembled")
 - assembled")
Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Your quotations are available online on your customer account.
The Leo Rover is a mobile research and educational robot running on a Raspberry Pi 3 that you can customise at will thanks to a wide range of modules!
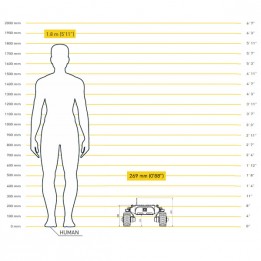
More compact and lighter than most, the Leo Rover mobile robot for research and higher education consists of a rectangular platform mounted on a 4-wheel drive chassis, capable of adapting to the most difficult terrains. Its water-resistant platform can carry up to 5 kg of equipment, and the Leo Rover has an autonomy of 4 hours – enough to organise long expeditions in hostile terrain!

Built on a Raspberry Pi 3 , the Leo Rover offers a wide range of connectors (SPI, USB, etc.) allowing you to add extra modules, for example an IMU for navigation, sensors or a LiDAR range finder . And because Raspberry Pi is synonymous with open source, you can develop your own DIY Martian rover as you see fit (no project is too small!). There is a vast community just waiting to help you work on your Leo Rover projects and discover new ones.
This Raspberry Pi mobile robot can generate a WiFi hotspot to which you can then connect simply using your tablet, mobile phone or computer. You will then benefit from a 2.4 GHz wireless connection covering a 100 m range, and can control your mobile robot remotely via MacOS, Android or Linux. Then launch the live video streaming to see through your rover’s eyes thanks to its on-board camera! Its intuitive live streaming software was inspired by the missions carried out by exploration robots on Mars.
Includes:
Mobile robot Leo Rover unboxing video
You’ll find everything you need here in open source to learn more about your Leo Rover!
 - assembled")
The Leo Rover is a mobile research and educational robot running on a Raspberry Pi 3 that you can customise at will thanks to a wide range of modules!